

Чекарев Константин Владимирович[0000-0002-5140-5142]1,2
Залиханов Алим Михайлович[0000-0002-2540-6045]1,3
1Московский государственный университет им. М.В. Ломоносова, Москва, Россия
2E-mail:kostya-chekarev@yandex.ru,
3E-mail:bulungu@yandex.ru
Аннотация. Установки, преобразующие кинетическую энергию ветра в электроэнергию, из-за низкой плотности воздуха имеют большие размеры. Известен вариант парусной энергетической установки, преобразующей энергию ветрового потока в энергию водного потока, который позволяет уменьшить размеры преобразователя энергии, однако ее эффективность при этом падает, поскольку часть энергии ветрового потока расходуется на перемещение парусной установки, а также возникают сложности при передаче вырабатываемой энергии внешнему потребителю. Предложен вариант парусной энергетической установку наземного базирования, в которой эти проблемы снимаются. Проведенные экспериментальные исследования макетов парусных энергетических установок наземного базирования показали работоспособность входящих в экспериментальную установку элементов, найдены элементы конструкции, которые могут быть использованы при реализации парусной установки наземного базирования. С целью определения мощности, которую могут развивать парусные установки наземного базирования, на разработанной экспериментальной установке были проведены исследования по определению величины сил, от которых зависит скорость движения макетов парусной установки. Результаты этих исследований представлены в данной статье.
Ключевые слова: ветроэнергетика, возобновляемые источники энергии, парусная энергетическая установка, макет, экспериментальный исследования.
Введение
Использование кинетической энергии ветра в хозяйственной деятельности насчитывает много веков. Преобразователи энергии ветра в виде ветроколеса использовались только на суше для совершения работы, а преобразователи ветровой энергии в виде паруса использовались в основном на водных акваториях для перемещения транспортных средств. Известны примеры использования парусов для перемещения транспортных средств на суше [1], но это направления развития не получило. В последние десятилетия установки с преобразователем энергии в виде ветроколеса стали использоваться для производства электроэнергии и устанавливаются как на суше, так и на море.
В большинстве действующих ветровых установках преобразование энергии ветрового потока в электроэнергию осуществляется с помощью ветроколеса с горизонтальной осью вращения и соединенного с ним электрогенератора, которые устанавливаются в гондоле ветроэнергетической установки на мачте. Такая ориентация ветроколеса является оптимальной для эффективного преобразования энергии ветрового потока, однако, из-за низкой плотности воздуха, в установках большой мощности диаметр ветроколеса может превышать величину 100 метров. Чтобы выдержать большой вес установки и ветровые нагрузки необходима прочная конструкция и соответствующее основание, что приводит к усложнению конструкций и увеличению их стоимости. Предлагаются различные варианты решения проблемы, связанной с большими размерами преобразователей энергии ветрового потока. В представленной работе рассматриваются возможности использования одного из таких вариантов – наземной установки челночно движущейся по направляющим.
Актуальность исследования и постановка задачи
Известен вариант ветроэнергетической морской установки повышенной мощности, в которой система жестких парусов, выполненная в виде вертикальных лопастей, удерживается на поверхности воды кольцевым понтоном, который вращается вокруг вертикальной оси [2]. В предлагаемой конструкции энергетической установки проблема создания прочной опоры при больших размерах преобразователей энергии снимается, однако эффективность преобразования ветрового потока при этом уменьшается, поскольку на половине траектории преобразователи ветровой энергии движутся под острым углом к направлению ветра. Установка может работать только при большом диаметре кольцевого понтона, в противном случае система наветренных парусов будет перекрывать систему парусов, находящихся за ними. Однако при большом диаметре кольцевого понтона практически невозможно создать конструкцию, способную выдерживать волновое воздействие.
Был предложен вариант парусной энергетической установки, также позволяющей снять проблему больших размеров преобразователя энергии ветрового потока и проблему устойчивости к волновому воздействию [3, 4, 5]. Предложенный вариант энергетической установки содержит парусный катамаран, ко дну корпусов которого снаружи прикреплен гидрогенератор, выполненный в виде крыльчатки и электрогенератора. При движении катамарана возникает обтекающий его корпуса водный поток, который вращает крыльчатку гидрогенератора. Катамаран движется циклично по дуговой траектории в заданном угловом интервале, что позволяет увеличить эффективность преобразования энергии ветрового потока. Для движения по такой траектории катамаран выполнен в виде конструкции, симметричной относительно носа и кормы, и имеет систему изменения положения парусов и систему управления движением катамарана. Движение по дуговой траектории позволяет автоматизировать этот процесс [5]. В предлагаемых вариантах энергетических установок их эффективность также оказывается низкой, поскольку часть энергии ветрового потока расходуется на преодоление сил сопротивления воды катамараном. Кроме этого, возникают сложности с передачей вырабатываемой электроэнергии внешнему потребителю.
Эффективность парусной энергетической установки можно повысить и при этом снять проблему передачи вырабатываемой энергии внешнему потребителю, если сделать парусную энергетическую установку наземного базирования движущегося по направляющим и передавать вырабатываемую электроэнергию внешнему потребителю по контактному рельсу.
Известен вариант конструкции парусной энергетической установка наземного базирования [6], который является сухопутным аналогом ветроэнергетической морской установки [2]. Установка содержит платформы, соединенные в замкнутый состав, который движется по радиальному рельсовому пути. На платформах установлена система парусов, которые меняют положение в зависимости от направления ветра и участка пути. Электроэнергия вырабатывается с помощью электрогенераторов, соединенных с колесами платформ. Как и ветроэнергетическая морская установка [2], предлагаемая конструкция может работать только при большом диаметре рельсового пути, поскольку при малых диаметрах система наветренных парусов будет перекрывать систему парусов, расположенную за ней. Эффективность преобразования энергии ветрового потока, при этом, будет низкой, поскольку на половине пути платформы перемещаются под острым углом к направлению ветра.
Эффективность парусной энергетической установки наземного базирования можно повысить, если состав платформ сделать незамкнутым и изменить характер движения платформ так, как это сделано в парусной энергетической установке [3]. Это означает, что платформы должны двигаться циклично в заданном угловом интервале и иметь систему изменения положения парусов и систему управления движением платформ для того, чтобы платформы начинали двигаться в противоположную сторону в точках, ограничивающих угловой интервал перемещений платформ.
Для исследования предложенной схемы была создана экспериментальная установка, элементы которой отрабатывались в процессе проведения экспериментов, при этом учитывался опыт и использовались элементы экспериментальной установки, на которой проводились исследования парусной энергетической установки морского базирования [4, 5].
С целью определения мощности, которую могут развивать парусные энергетические установки наземного базирования, были проведены экспериментальные исследования сил, от которых зависит скорость движения макетов парусной установки и их величин.
Экспериментальная установка и методика проведения экспериментов
Экспериментальная установка включала генератор ветрового потока, платформы, на которых была установлены паруса, систему изменения положения парусов, направляющую систему, и систему управления движением платформ.
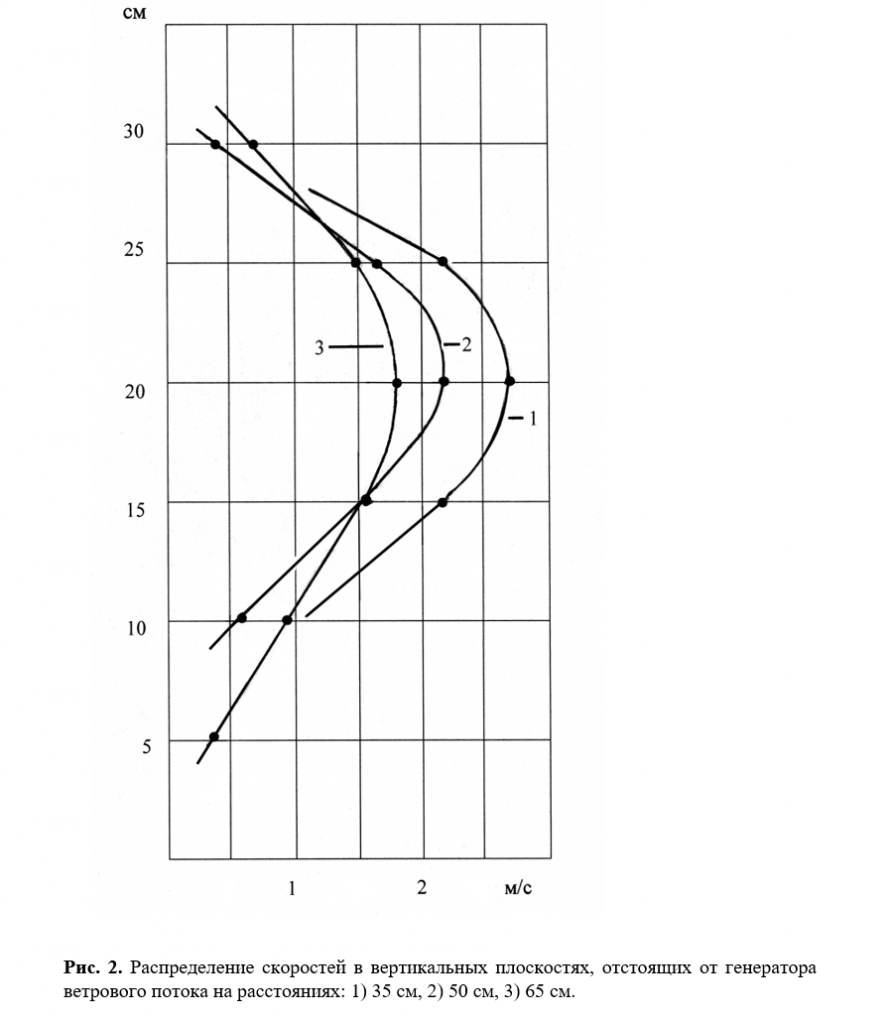
Генератор ветрового потока был выполнен в виде системы вытяжных вентиляторов в количестве 13 штук, расположенных рядом друг с другом на рейке, длиной 2 метра (Рис.1). На Рис.2 представлен график распределения скоростей ветрового потока в вертикальных плоскостях, отстоящих от генератора ветрового потока на расстояниях 35 см, 50 см и 65 см. Как показали результаты исследований, изложенные в статье [7], несмотря на разное распределение скоростей в этих плоскостях, эффективность воздействия ветрового потока на скорость движения платформ на различных расстояниях от генераторов, оказалась практически одинаковой. При этом, благодаря равномерности ветрового потока от системы вентиляторов, вертикальные профили сохраняли свою форму по всей длине установки.

Экспериментальные исследования проводились на тех же платформах, что и эксперименты, результаты которых приведены в статье [7]. Изображение платформы представлено на Рис.3. Рамка платформы, к которой крепились 4 пластмассовых колеса диаметром 40 мм, имела размер 22 см в длину и 17 см в ширину. В середине платформы на высоте 30 мм от рамки крепилась рейка, на которой в поворотных устройствах глубиной 30 мм устанавливались мачты, выполненные в виде пластиковых трубок диаметром 5 мм и высотой 30 см. Мачты были расположенные на расстоянии 11 см друг от друга. Они поворачивались вокруг своей оси с помощью системы изменения положения парусов, включавшей электромотор с редуктором, на вал которого была установлена небольшая шестеренка, а на одной из мачт была закреплена шестеренка большего диаметра.
Для независимого вращения электромотора в противоположные стороны стороны, на платформе были установлены 2 аккумулятора. Мачты могли поворачиваться в угловом диапазоне 70-100 градусов. К мачтам были прикреплены паруса площадью 312 квадратных сантиметров каждый. Чтобы снизить ветровую нагрузку на систему изменения положения парусов, они имели симметричную форму относительно мачты, как это видно на Рис. 3. Паруса имели форму трапеции высотой 24 см, основаниями 16 см (низ паруса) и 10 см (верх паруса). Паруса были сделаны из металлизированной пленки, которая крепилась к мачте и нижней рее, и были усилены 3 ребрами. Для одновременного поворота парусов, концы нижних рей были соединены легкими перемычками.
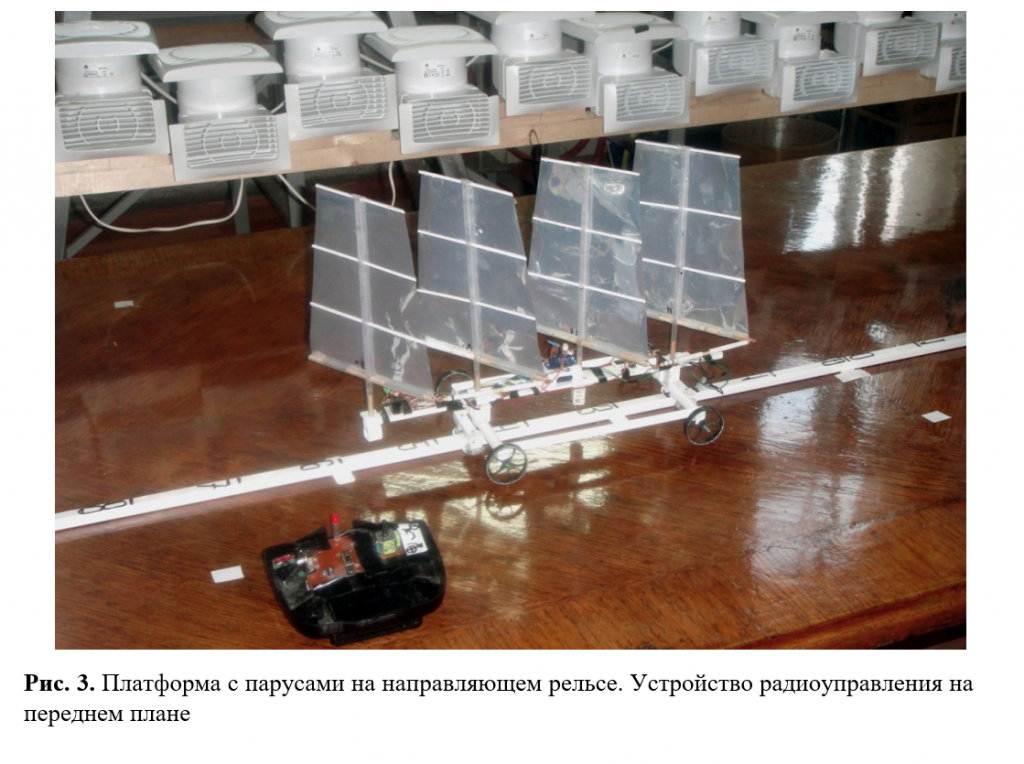
Платформы двигались по гладкой, горизонтальной плоскости длинной 3 метра и шириной 1,2 м. Траектория движения платформ задавалось направляющей системой, которая была разработана для проведения экспериментов. Она включала 3 направляющих рельса, расположенных на расстоянии 35 см, 50 си и 65 см от вертикальной плоскости генератора ветрового потока. В качестве направляющих рельсов использовались пластмассовые кабель-каналы сечением 12х12 мм и длиной 2 метра. На всех направляющих рельсах была нанесена разметка с интервалами в 10 см. Направляющая система включала также 4 колеса диаметром 15 мм, закрепленных по 2 на коротких сторонах рамки платформы. Их оси были вертикальны и были установлены так, чтобы направляющий рельс находился между ними. Расположение направляющих колес видно на Рис.3. При таком расположении колес платформы свободно перемещались вдоль направляющего рельса.
В состав экспериментальной установки входила система управления движением платформы, имитирующая автоматическое управление движением платформы по её положению, которое задается координатами GPS. Управление осуществлялось с помощью радиосигналов, которые передавались с пульта на установленный на платформе приемник, соединенный с системой изменения положения парусов. По этому сигналу паруса изменяли свое положение на противоположное. Для работы приемника радиосигналов на платформе устанавливался аккумулятор.
При проведении экспериментов движение платформ снималось на видеокамеру. По полученным записям строились графики движения платформ в зависимости от времени и определялись скорости движения платформ.
Результаты экспериментов и обсуждение
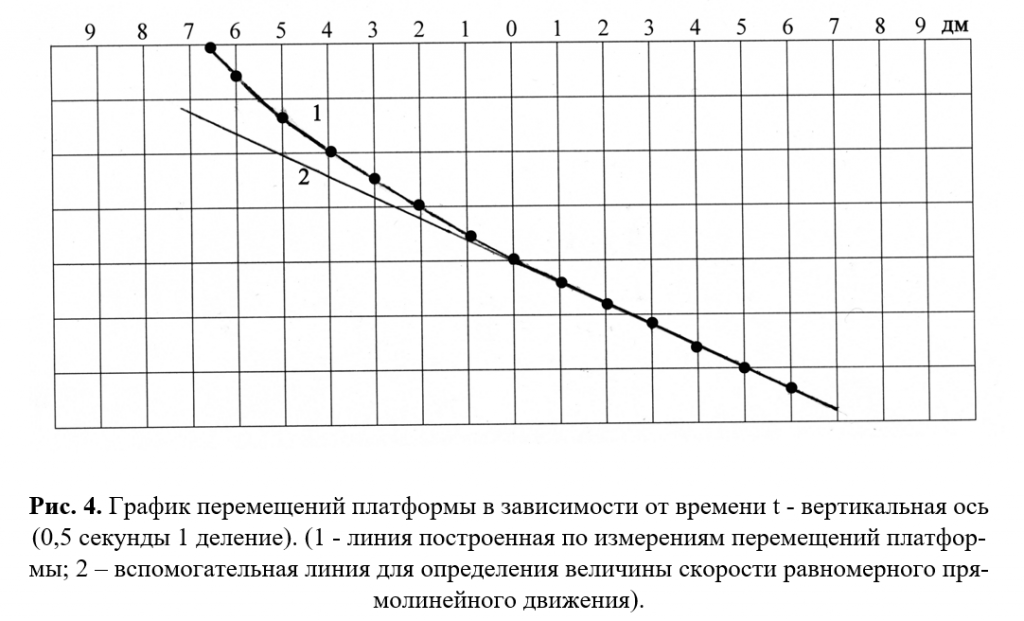
На платформу с парусами действуют следующие силы: действующая на паруса сила F ветрового потока, который формируется генератором ветрового потока, и сила трения качения FT=kTmg, действующая на колеса платформы. При постоянном установленном угле поворота паруса к направлению ветра и постоянной массе платформы силы F и FT остаются постоянными. Если разность этих сил не равна нулю, то платформа под действием этих сил будет двигаться с ускорением. При движении платформы возникает аэродинамическая сила сопротивления FC, обусловленная вымпельным ветром. При увеличении скорости платформы величина силы сопротивления FC возрастает, и с определенного момента платформа начинает двигаться с постоянной скоростью, как это видно из графика перемещений платформы в зависимости от времени, представленного на Рис 4.
При равномерном движении платформы соотношение действующих на неё сил описывается уравнением:
Fп— FT— FC= 0 ( 1 )
где Fп – аэродинамическая сила (сила давления), перпендикулярная ветровому потоку, действующая на паруса платформы;
FT= kTmg – сила трения качения колес;
FС – сила сопротивления движению платформы.
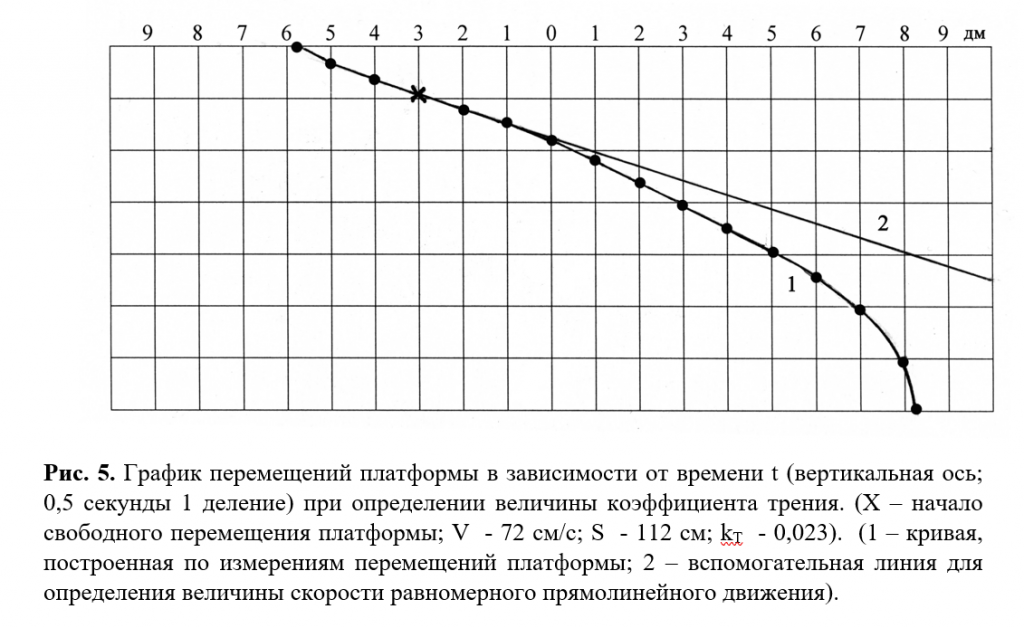
Для определения величины сил, действующих на платформу, была разработана методика, первым этапом которой является нахождение величины коэффициента трения. Величина коэффициента силы трения kT определялась следующим образом: платформа без парусов ставилась на направляющий рельс и ей придавалась некоторая скорость. В результате действия силы трения скорость платформы уменьшалась и через некоторое время она останавливалась. Перемещение платформы фиксировалось видеокамерой, по полученным записям определялась начальная скорость платформы V и величина пути свободного перемещения платформы S. Из соотношения mV2/2 = kTmgS, величина коэффициента трения kТ будет: kT = V2/2gS.
На Рис. 5 представлен график перемещения платформы в зависимости от времени, по которому определялась величина коэффициента трения. Из нескольких реализаций пуска платформы определили, что величина коэффициента трения равна kT= 0,023. Знание величины коэффициента трения, кроме установления величины силы трения, является необходимым условием для нахождения величины всех сил, определяющих движение платформы.
После определения величины коэффициента трения была проведена серия экспериментов для нахождения величины аэродинамической силы, перпендикулярной ветровому потоку, действующей на паруса, и силы сопротивления движению платформы. При проведении этой серии экспериментов платформа ставилась на направляющий рельс, отстоящий от генератора ветрового потока на расстоянии 50 см, затем на неё устанавливали груз различного веса и давали платформе возможность перемещаться под действием ветрового потока. Вес груза менялся от 30 грамм до 140 грамм. По видеозаписям перемещений платформы определялась её скорость с грузами разного веса. В таблице 1 представлены значения величины скорости платформы с грузами разного веса в режиме ручного пуска.
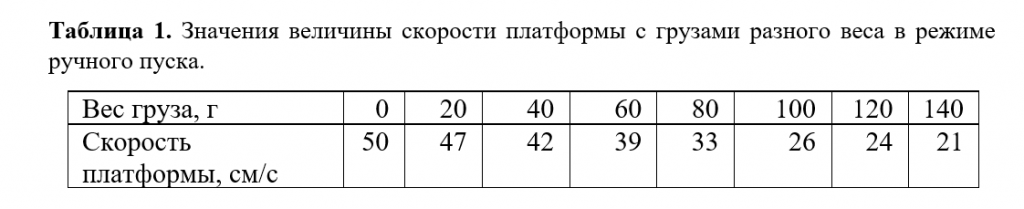
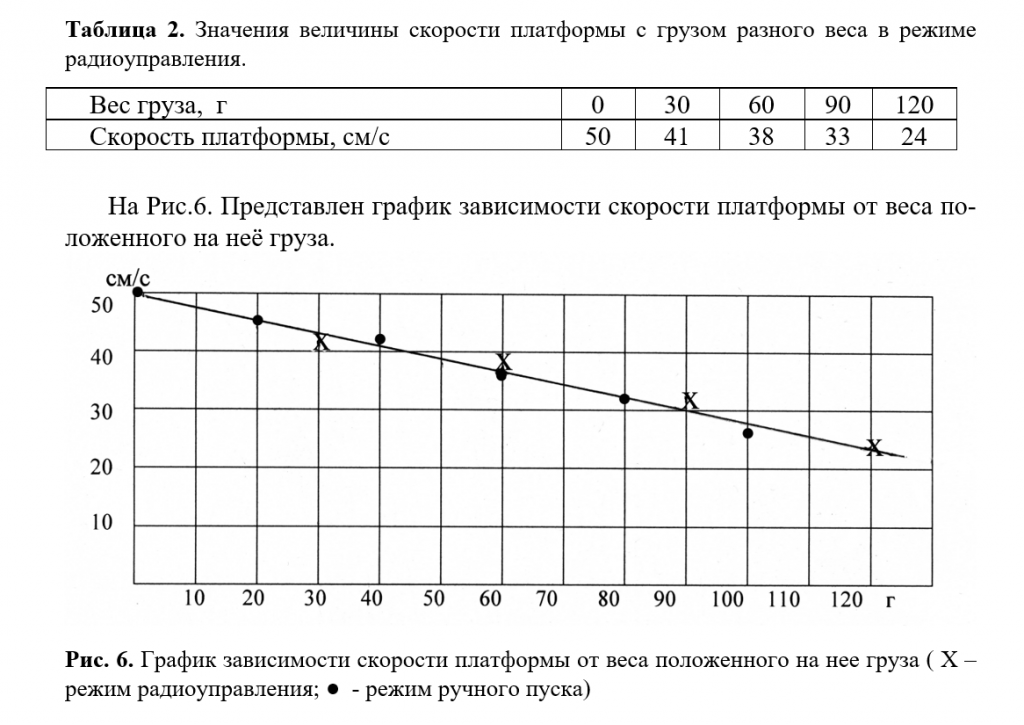
Поскольку предполагается, что движение платформы будет регулироваться автоматической системой управления, а также для подтверждения достоверности значений величин скоростей платформы, полученных в первой серии измерений при ручном пуске, была проведена аналогичная серия экспериментов по определению скорости перемещений платформы с грузами разного веса в режиме радиоуправления. Полученные результаты различались незначительно (см Рис. 6) и позволили построить общий график зависимости скорости платформы от веса положенного на нее груза.
В Таблице 2 представлены значения величины скорости платформы с грузом разного веса в режиме радиоуправления.
При движении платформы с постоянной скоростью соотношение сил, действующих на платформу, определяется выражением
F – kTmg – FC = 0 ( 1 )
Известно, что сила сопротивления движению, действующая на парус пропорциональна квадрату скорости [8], поэтому её можно представить в виде
F = kcV2( 2 )
С учетом соотношения ( 2) уравнение ( 1 ) можно представить в виде
F – kcmg – kcV2 = 0 ( 3)
Используя уравнение (1) для двух грузов весом m1g и m2g можно составить следующее соотношение:
kTm1g + kсV12 = kTm2g + kсV22 ( 4 )
Из соотношения (4) устанавливается выражение для нахождения величины коэффициента kс
kс= kT(m2 g – m1g)/ (V12— V12) ( 5 )
Подстановкой в выражение (5) величины коэффициента трения kT и данных из Таблицы 1 определяется значение коэффициента kc= 0,0014 г с2/см2. Определение величины коэффициента kcпозволяет найти величину аэродинамической силы F, перпендикулярной ветровому потоку, действующей на паруса платформы, и величину силы сопротивления движению платформы при её движении с грузами разного веса и платформы. Для нахождения величины силы F в уравнение (3) нужно подставить полученные значения коэффициентов kT и kV , суммарный вес груза и вес платформы, равный 176 г. Подстановка указанных величин дает значение силы F= 7,1 г. или около 0,07 ньютона.
Выводы
Эксперименты показали работоспособность элементов, входящих в экспериментальную установку, однако некоторые из них вносят ограничение на проведение исследований. Это касается в первую очередь генератора ветрового потока, который формирует ветровой поток с большой неравномерностью скоростей в вертикальной плоскости, что не позволяет проводить расчет сил, определяющих движение платформы. Для того чтобы обойти эти ограничения, был разработан экспериментальный метод определения этих сил путем нахождения величины скорости движения платформы с грузом разного веса. С помощью разработанного метода была найдена величина всех сил, определяющих движение платформы.
Эксперименты показали работоспособность входящих в установку элементов, а также были определены элементы конструкции, которые могут быть использованы при реализации парусной установки наземного базирования.
Кроме генератора ветрового потока, имеются элементы экспериментальной установки, требующие дальнейшего развития, в частности, направляющая система, которая должна исполнять функцию передачи электричества внешнему потребителю. Поставленные задачи будут решаться в ходе проведения дальнейших экспериментов.
Литература
- Дигай П. Под парусами по рельсам// Yachrussia.com/articlts/2016/10/21/ articlts_391.html [25.10.2022]
- Чебоксаров В.В., Кузнецов Н.Н. Гибридные ветро-солнечные морские энергетические установки // Строительство и технологическая безопасность. №18 (70), 2020. С.67-81.
- Патент № 2745173 РФ, МПК B63B 35/44 (2006.01) / Парусная энергетическая установка; № 2020128596, заявл. 2020.08.28 / Чекарев К.В., Дегтярев К.С., Залиханов А.М. – заявители и правообладатели // «Изобретения. Полезные модели». 2021. № 9.
- Чекарев К.В., Залиханов А.М. Катамаран как парусная энергетическая установка: увеличение скоростных характеристик. // Окружающая среда и энерговедение. №2 (10), 2021, с. 96-107.
- Чекарев К.В., Залиханов А.М., Дегтярев К.С. Парусные энергетические установки. // География возобновляемых источников энергии. ИД «Энергия», М., 2021. С.180-197.
- Патент № 2125182 РФ, МПК F 03 D 5/04 / Ветроэнергетическая установка; № 96123627/06, заявл. 1996.12.16 / Цыбульников С.И. — заявитель и правообладатель //
- Чекарев К.В., Залиханов А.М. Парусная энергетическая установка наземного базирования // Окружающая среда и энерговедение. №2 (14), 2022. С.77-90. http://jeees.ru/ /category/journal/2022-2/
- Аэродинамика и гидродинамика парусного судна. sea-man. org/aerodinamika-parusa [25.10.2022]