

Чекарев Константин Владимирович[0000-0002-5140-5142]1,2
Залиханов Алим Михайлович[0000-0002-2540-6045]1,3
1Московский государственный университет им. М.В. Ломоносова, Москва, Россия
2E-mail:kostya-chekarev@yandex.ru,
3E-mail:bulungu@yandex.ru
Аннотация. Установки, преобразующие кинетическую энергию ветра в электричество, в том числе плавающие ветровые установки, из-за низкой плотности воздуха имеют большие размеры. Известен вариант парусной энергетической установки, преобразующей энергию ветрового потока в энергию водного потока, который используется для производства электричества, что позволяет уменьшить размеры преобразователя энергии, однако эффективность энергетических установок при этом падает, поскольку часть энергии ветрового потока расходуется на перемещение парусной установки. Кроме этого, возникают сложности при передаче вырабатываемой энергии внешнему потребителю. Эффективность парусной энергетической установки может быть повышена, если ее установить на земле. В этом случае, для выработки электричества используется движение установки, при этом проблема с передачей вырабатываемой энергии внешнему потребителю снимается. Кроме этого парусные энергетические установки наземного базирования расширяют область использования ветроэнергетики. Был проведен анализ возможных путей реализации парусной энергетической установки наземного базирования, а также была создана экспериментальная установка, на которой были проведены испытания макетов парусных энергетических установок с целью проверки функционирования входящих в экспериментальную установку элементов и нахождения элементов конструкции, которые могут быть использованы при реализации парусной установки наземного базирования. Результаты этих исследований представлены в данной статье.
Ключевые слова: ветроэнергетика, возобновляемые источники энергии, ветровая установка, парусная энергетическая установка.
1. Введение
Ветроэнергетика является одной из самых быстро развивающихся отраслей возобновляемой энергетики. По оценкам TheGlobalWindCouncil (GWEC), представленном в отчете за 2021 год [1], 2020 год был лучшим в глобальной ветроэнергетике. Мощность ветровых установок увеличилась на 93 ГВт, из них 6,1 ГВт приходится на оффшорные установки. В 2020 году общая установленная мощность оффшорных установок достигла величины 35 ГВт, что составляет 4,8 % от общего числа ветровых установок. Одной из причин, ограничивающих рост оффшорных установок, является их зависимость от глубины моря. Для уменьшения этой зависимости разработаны плавающие ветровые установки. Первая плавающая ветровая установка была построена у берегов Норвегии в 2009 году, затем плавающие ветровые установки были построены в других странах [2, 3].
В большинстве действующих ветровых установках преобразование энергии ветрового потока в электричество осуществляется с помощью ветроколеса с горизонтальной осью вращения и соединенного с ним электрогенератора, которые устанавливаются на мачте. Такая ориентация ветроколеса является оптимальной для эффективного преобразования энергии ветрового потока, поскольку силы, действующие на лопасти ветроколеса, остаются постоянными при их перемещении. Из-за низкой плотности воздуха в установках большой мощности диаметр ветроколеса может превышать величину 200 метров. Для удержания ветроколеса таких размеров необходима прочная конструкция и соответствующее основание, чтобы выдерживать большой вес установки и ветровые нагрузки.
При строительстве плавающих ветровых установок это приводит к усложнению конструкций и увеличению их стоимости при обеспечении остойчивости энергетических установок.
Предлагаются различные варианты решения проблемы, связанной с большими размерами преобразователей энергии ветрового потока.
2. Аналитический обзор
Был предложен вариант ветроэнергетической морской установки повышенной мощности, в которой система жестких парусов, выполненная в виде вертикальных лопастей, удерживается на поверхности воды кольцевым понтоном, который вращается вокруг вертикальной оси [4]. В предлагаемой конструкции энергетической установки проблема создания прочной опоры при больших размерах преобразователей энергии снимается, однако эффективность преобразования ветрового потока при этом уменьшается, поскольку на половине траектории преобразователи ветровой энергии движутся под острым углом к направлению ветра. Установка может работать только при большом диаметре кольцевого понтона, в противном случае система наветренных парусов будет перекрывать систему парусов, находящихся за ними. Однако при большом диаметре кольцевого понтона практически невозможно создать конструкцию, способную выдерживать волновое воздействие.
Известен вариант парусной энергетической установки, также позволяющей снять проблему больших размеров преобразователя энергии ветрового потока и проблему устойчивости к волновому воздействию [5]. Предложенный вариант энергетической установки содержит парусный катамаран, к корпусам которого снизу прикреплен гидрогенератор, выполненный в виде крыльчатки и электрогенератора. При движении катамарана возникает обтекающий его корпуса водный поток, который вращает крыльчатку и соединенный с ней электрогенератор. Траектория катамарана представлена в виде треугольника, одна из сторон которого перпендикулярна направлению ветра. В усовершенствованном варианте этой парусной энергетической установки катамаран движется циклично по дуговой траектории в заданном угловом интервале, что позволяет увеличить эффективность преобразования энергии ветрового потока [6]. Для движения по такой траектории катамаран выполнен в виде конструкции, симметричной относительно носа и кормы, и имеет систему изменения положения парусов и систему изменения направления движения катамарана. Движение по дуговой траектории позволяет автоматизировать этот процесс [7]. Однако в предлагаемых вариантах энергетических установок их эффективность также оказывается низкой, поскольку часть энергии ветрового потока расходуется на перемещение катамарана. Кроме этого, возникают сложности с передачей вырабатываемого электричества внешнему потребителю электричества.
Эффективность парусной энергетической установки можно повысить и при этом снять проблему передачи вырабатываемой энергии внешнему потребителю, если сделать парусную энергетическую установку наземного базирования. Эффективность энергетической установки может быть повышена за счет того, что перемещение установки можно использовать для производства электричества, а не получать его за счет перемещений преобразователя энергии, при этом вырабатываемое электричество можно передавать внешнему потребителю по контактному рельсу.
Известен вариант конструкции парусной энергетической установка наземного базирования [8], который является сухопутным аналогом ветроэнергетической морской установки [4]. Установка содержит платформы, соединенные в замкнутый состав, который движется по радиальному рельсовому пути. На платформах установлена система парусов, которые меняют положение в зависимости от направления ветра и участка пути. Электричество вырабатывается с помощью электрогенераторов, соединенных с колесами платформ. Как и ветроэнергетическая морская установка [4], предлагаемая конструкция может работать только при большом диаметре рельсового пути, поскольку при малых диаметрах система наветренных парусов будет перекрывать систему парусов, расположенную за ней. При этом эффективность преобразования энергии ветрового потока будет низкой, поскольку на половине пути платформы перемещаются под острым углом к направлению ветра.
Эффективность энергетических установок данной конструкции можно повысить, если состав платформ сделать незамкнутым и изменить характер движения платформ так, как это сделано в парусной энергетической установке [6]. Это означает, что платформы должны двигаться циклично в заданном угловом интервале и иметь систему изменения положения парусов и систему управления движением платформ для того, чтобы платформы начинали двигаться в противоположную сторону в точках, ограничивающих угловой интервал перемещений платформ.
В возможности реализации парусных энергетических установок сомнений нет. Есть свидетельства использования парусов для организации движения колесного транспорта в Китае много веков тому назад. В 19 веке в северной Америке паруса ставились на повозки для поездок из города в город [8]. С появлением железных дорог паруса стали устанавливать на платформы для организации их движения [9], однако использование парусов для производства электричества развития не получило. Можно предположить, что этого было несколько причин. Во-первых, энергетическая эффективность установок с ветроколесом с горизонтальной осью вращения выше, чем у других установок. Во-вторых, в тех местах, где установки с ветроколесом с горизонтальной осью вращения сооружались, была возможность их поставить, т.е. грунт был такой, что на нем можно было поставить башню, на которой устанавливается ветроколесо и электрогенератор.
Однако имеется много мест, где есть потребность в электроэнергии, и есть возможность получать её с помощью энергии ветра, но нет возможности поставить высокие мачты. В этом случае использование парусных установок наземного базирования может быть решением проблемы. Такая ситуация существует, например, в Арктике в местах, расположенных на вечной мерзлоте. Можно привести и другие примеры областей, где могут быть использованы парусные энергетические установки наземного базирования. Отсюда следует необходимость проводить разработку конструкций таких систем, в частности, при проведении лабораторных исследований на макетах энергетических установок.
3. Экспериментальная установка и методика проведения исследований
Устройство элементов экспериментальной установки отрабатывалось в процессе проведения экспериментов, при этом учитывался опыт и использовались элементы экспериментальной установки, на которой проводились исследования парусной энергетической установки морского базирования [6]. Экспериментальная установка включала генератор ветрового потока, платформы, на которых были установлены паруса, систему изменения положения парусов, направляющую систему, и систему управления движением платформ.
Одним из наиболее значимых элементов экспериментальной установки является генератор ветрового потока. На начальной стадии проведения экспериментов использовался генератор ветрового потока старой конструкции, который был выполнен в виде системы вытяжных вентиляторов в количестве 8 штук, расположенных на рейке длиной 2 метра на расстоянии 22 см друг от друга [11]. Конструкция генератора ветрового потока была разработана на основе полученной трехмерной картины, показывающей границы ветрового потока, генерируемого отдельным вентилятором. В генераторе старой конструкции из-за дискретности расположений вентиляторов на рейке существует неравномерность ветрового потока по горизонтали. В экспериментах с макетами парусных энергетических установок морского базирования, выполненных виде катамаранов, можно было пользоваться генератором ветрового потока такой конструкции, поскольку сила сопротивления воды движению судна пропорциональна квадрату скорости и в начале движения она практически равна нулю, поэтому при проведении экспериментов катамараны начинали двигаться при любом ветровом воздействии. В экспериментах с парусными установками наземного базирования одной их сил сопротивления является сила трения колес. При горизонтальном движении платформы сила трения пропорциональна ее весу и в начале движения она не равна нулю. На начальной стадии проведения экспериментов было обнаружено, что при увеличении веса платформы воздействие генератора ветрового потока старой конструкции оказывалось недостаточным для того, чтобы платформы двигались с нужной скоростью. Был создан генератор ветрового потока, в котором неравномерность ветрового потока по горизонтали устранялась. Для этого на рейке длиной 2 метра было установлено 15 вентиляторов, расположенных плотно друг к другу. Изображение генератора ветрового потока представлено на рис.1.

Конструкция платформ также разрабатывалась в процессе проведения экспериментов: ее размер, количество установленных мачт, способ их крепления, форма парусов, способ изменения положения парусов, размер и тип колес. Изображение разработанной конструкции, на которой проводились эксперименты, представлено на рис.2. Рамка платформы, к которой крепились 4 пластмассовых колеса диаметром 40 мм, имела размер 22 см в длину и 17 см в ширину. В середине платформы на высоте 30 мм от рамки крепилась рейка, на которой в поворотных устройствах глубиной 30 мм устанавливались мачты, выполненные в виде пластиковых трубок диаметром 5 мм и высотой 30 см. В начале проведения экспериментов на платформе устанавливались 3 мачты, однако для того, чтобы осуществлять управление ее движением, было необходимо увеличить вес платформы, что приводило к уменьшению ее скорости. Чтобы сохранить скорость платформы, на нее уставили еще одну мачту. Мачты были расположенные на расстоянии 11 см друг от друга и соединены легкими перемычками. Мачты поворачивались вокруг своей оси с помощью системы изменения положения парусов. На начальном этапе проведения экспериментов использовалась старая конструкция системы изменения положения парусов, которая не позволяла точно выставлять угловые параметры положения парусов. При проведении экспериментов возникла необходимость точно устанавливать угол поворота парусов, поскольку от углового положения парусов зависела скорость платформ. Для задания точного углового положения парусов была разработана система изменения положения парусов, которая включала электромотор с редуктором, на вал которого была надета небольшая шестеренка, а на одной из мачт была закреплена шестеренка большего диаметра. Для того, чтобы электромотор мог вращаться по часовой и против часовой стрелки, на платформе устанавливали два аккумулятора, что увеличивало вес платформы, а значит, и силу трения. В зависимости от поставленной задачи мачты могли поворачиваться в угловом диапазоне 70-100 угл. град.

К мачтам были прикреплены паруса площадью 312 см2 каждый. В начале проведения экспериментов использовались паруса, закрепленные на мачтах с гиком, однако в ходе проведения экспериментов было обнаружено, что поворот паруса такой конструкции представлял большую нагрузку для системы изменения положения парусов: в отсутствии ветрового потока паруса легко поворачивались, а при воздействии ветрового потока они поворачиваться переставали. Чтобы снизить нагрузку, паруса сделали симметричной формы относительно мачты, как это видно на рис. 2. Размеры парусов составляли по высоте 24 см, по ширине внизу 16 см. и вверху 10 см. Паруса были сделаны из металлизированной пленки, которая крепилась к мачте и нижней рее, и были усилены 3 ребрами.
Платформы двигались по гладкой, горизонтальной плоскости длинной 3 метра и шириной 1,2 м. Траектория движения платформ задавалось направляющей системой, которая была разработана для проведения экспериментов. Она включала 3 направляющих рельса, срасположенных на расстоянии 35 см, 50 си и 65 см от выходных отверстий генератора ветрового потока. Направляющие рельсы были выполнены в виде прямых пластмассовых полос размером с сечением 12 х12 мм и длинной 2 метра. На всех направляющих была нанесена цифровая разметка, означающая интервал в 10 см. Начало разметки совпадало с серединой генератора ветрового потока. Направляющая система включала также 4 колеса диаметром 15 мм, закрепленных по 2 на коротких сторонах рамки платформы. Их оси были направлены вертикально,находились на расстоянии 32 мм и были установлены так, чтобы направляющий рельс находился между ними. Расположение направляющих колес видно на рис.2. При таком расположении колес платформы свободно перемещались вдоль направляющего рельса.
В состав экспериментальной установки входила система, имитирующая управление движением платформы по ее положению, которая задается координатами GPS. Управление осуществлялось с помощью радиосигналов, которые передавались с пульта на установленный на платформе приемник, соединенный с системой изменения положения парусов. По этому сигналу паруса изменяли свое положение на противоположное в угловом интервале 70о-100 о. Для работы приемника радиосигналов на платформе устанавливался аккумулятор, что также увеличивало вес платформы.
При проведении экспериментов движение платформ снималось на видеокамеру. По полученным записям и с помощью разметки на направляющих рельсах строились графики движения платформ в зависимости от времени, по которым определялась скорость движения платформ.
4. Результаты экспериментов и обсуждение
Целью проведения экспериментов являлась, во-первых, проверка функционирования входящих в установку элементов и выявление возникающих проблем и, во-вторых, отработка элементов конструкции, которые могут быть использованы при реализации парусной энергетической установки наземного базирования.
Экспериментальные исследования начались с определения трехмерной картины ветрового потока, который создается генератором этого потока с помощью 15 вентиляторов. Для этого с помощью анемометра были измерены скорости ветрового потока в вертикальных плоскостях, отстоящих от выходных отверстий вентиляторов на расстоянии 35см, 50см и 65 см. Распределение скоростей по высоте в этих плоскостях представлены на рис. 3, а трехмерная картина ветрового потока представлена на рис. 4.
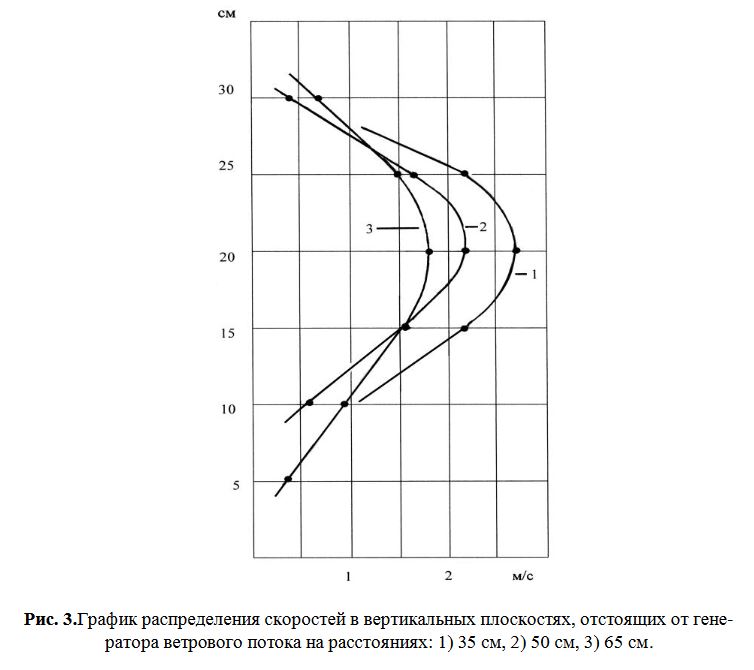
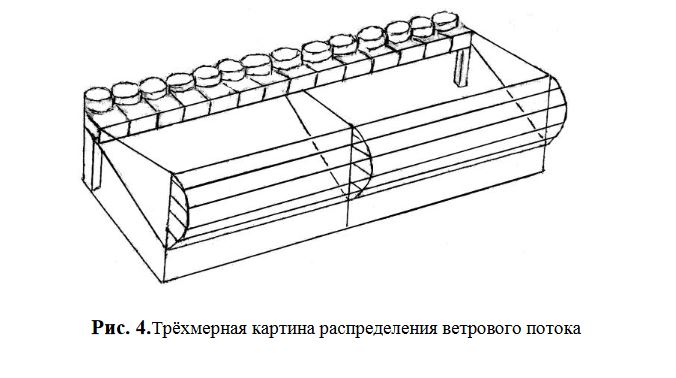
Как видно из рисунков, наибольшая неравномерность ветрового потока наблюдается в плоскости 35 см, при этом во всех плоскостях неравномерность ветрового потока по горизонтали отсутствует. Показателем эффективности воздействия ветрового потока на движение платформ является их скорость. При таком различии распределений величины скорости ветрового потока по высоте в разных плоскостях эффективность его воздействия на скорость движения платформ можно найти только при проведении экспериментальных исследований движений платформв этих плоскостях.
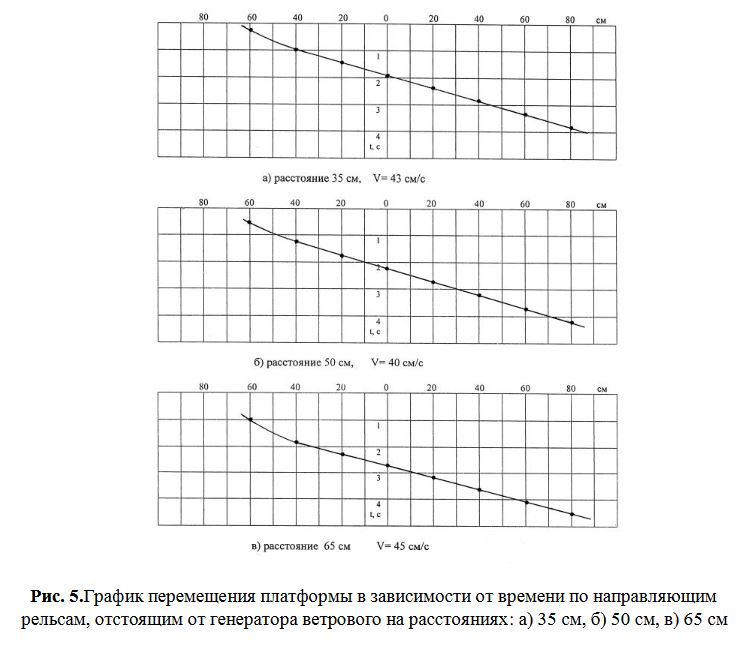
Были проведены исследования движений платформ вдоль направляющих, отстоящих от выходных отверстий вентиляторов на расстоянии 35 см, 50 см и 65 см. Графики зависимости перемещений платформ от времени вдоль направляющих рельсов, отстоящих от выходных отверстий генератора ветрового потока на расстояниях 30см, 50см и 65см представлены на рис.5. На этом же рисунке приведены величины скорости перемещений платформ по этим направляющим. Как видно из графиков перемещений и значений скоростей, эффективность воздействия ветрового потока на величину скорости платформ, при их движении в этих плоскостях, практически одинакова, что имеет большое значение при проведении исследований.
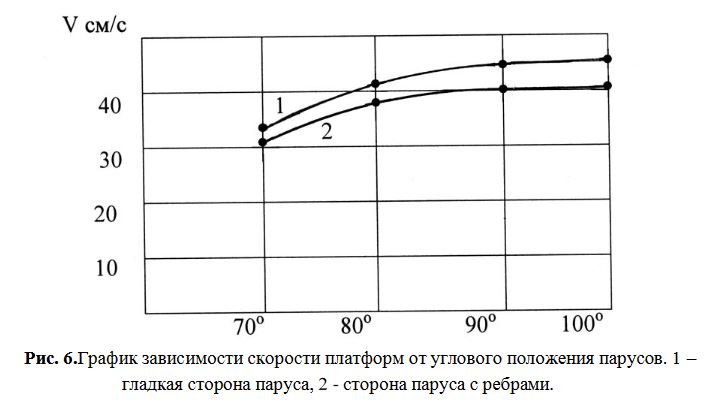
Была проведена серия экспериментов по определению зависимости скорости платформ от углового положения парусов относительно направления ветра. Величины углов изменялись в диапазоне 70о-100о. Платформа двигалась по направляющему рельсу, находящемуся на расстоянии 50 см от генератора ветрового потока. На рис.6 представлен график зависимости скорости платформы от величины углового положения парусов. Как видно из графика, скорость движения платформы достигает наибольшего значения при угловом положении парусов 100о. При проведении экспериментов была установлена зависимость скорости платформы от стороны поверхности паруса, с которой взаимодействует ветровой поток. Как было сказано выше, парус был выполнен в виде металлизированной пленки, наклеенной на мачты. Для усиления прочности паруса на него были наклеены 3 ребра. Эксперименты показали, что при одинаковом угловом положении парусов платформы движутся с меньшей скоростью, если ветровой поток направлен на сторону паруса, усиленную ребрами. На рис.6 приведены значения скоростей для гладкой стороны паруса и для стороны паруса с ребрами. В причинах такого явления нужно разобраться в следующих экспериментах.
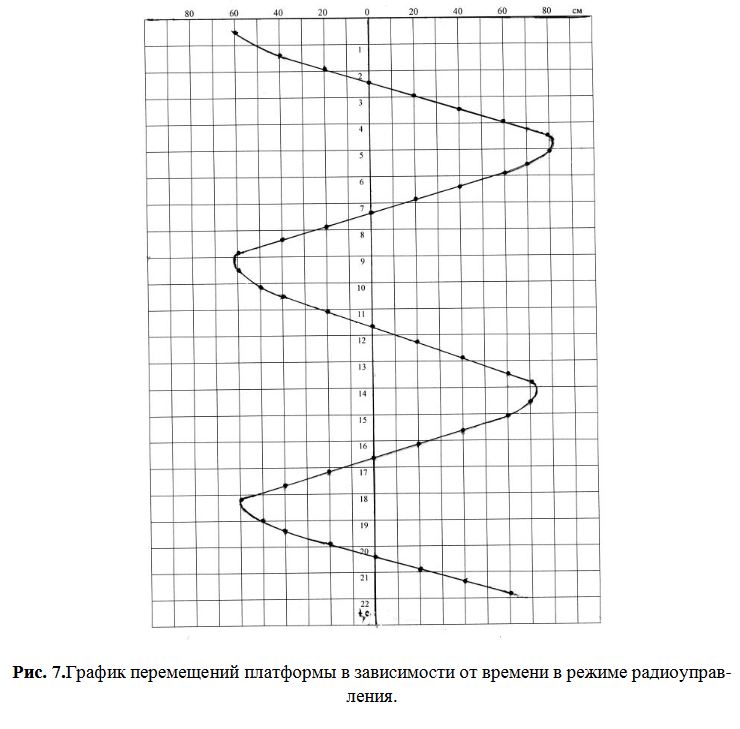
Функционирование системы изменения положения парусов и системы управления движением платформ можно проверить только при их совместной работе. Были проведены исследования перемещений платформы по направляющему рельсу, отстоящему от генератора ветрового потока на расстоянии 50 см при управлении движением платформы с помощью радиосигналов. График перемещений платформы в зависимости от времени представлен на рис.7.
Как видно из графика, платформа четко меняет направление движения, что говорит о нормальном функционировании системы изменения парусов и системы управления движением платформы. Изменение направления движения платформы происходит за временной интервал меньше 1 секунды, а временной интервал установления движения с постоянной скоростью лежит в пределах 1,5-2 секунд. Результаты экспериментов по управлению движением платформы с помощью радиосигналов показали, что управление движением платформы по ее положению возможно, если радиосигналы с пульта управления заменить сигналами положения платформы, которые задаются координатами GPS.
5. Выводы
На основании результатов, полученных в процессе проведения экспериментов, можно сделать следующие выводы:
а) Относительно экспериментальной установки: все входящие в нее элементы функционировали нормально, и их можно использовать при проведении дальнейших исследований.
б) Относительно конструкции платформы парусной энергетической установки: разработанная конструкция платформы может быть использована при реализации парусной энергетической установки наземного базирования, однако устройство некоторых ее элементов требует уточнения, которое можно получить в ходе дальнейших исследований. Это касается, в частности, устройства паруса, его формы, структуры.
в) Экспериментальные исследования показали, что управление движением платформы по сигналам GPS возможно.
В ходе проведения последующих экспериментов следует разработать методику экспериментального определения сил, действующих на платформу, которые определяют ее движение.
Кроме этого, нужно решить проблему передачи выработанного электричества внешнему потребителю по контактному рельсу. Таким образом, имеется множество вопросов, которые нужно уточнить с помощью экспериментальных исследований на макетах парусной энергетической установки наземного базирования.
Литература
- Global Wind Report 2021 – Global Wind Energy Council. URL: https://gwec.net/global-wind-report-2021 access date 27.06.2022.
- Перваявмиреплавучаяофшорная ветровая электростанция…URL: https://renen.ru/pervaya-v-mire-plavuchaya-ofshornaya-vetrovaya-elektrostantsiya-rabotaet-s-rekordnym-kium/access date 27.06.2022
- WindFloat Atlantic Project. URL: Power-technology.com/projects/windfloat-atlantic-projectaccess date 27.06.2022
- Чебоксаров В.В., Кузнецов Н.Н. Гибридные ветро-солнечные морские энергетические установки // Строительство и техногенная безопасность. №18(70)-2020. С.67-81
- Соловьёв А.А., Чекарев К.В., Соловьёв Д.А. Патент РФ № 2 722 760. Парусная энергетическая установка, преобразующая энергию потоков двух сред.
- Чекарев К.В., Дегтярев К.С., Залиханов А.М. Патент РФ № 2 745 173. Парусная энергетическая установка.
- Чекарев К.В., Залиханов А.М., Дегтярев К.С. Парусная энергетическая установка// География возобновляемых источников энергии. ИД «Энергия», Москва, 2021. С. 180-197
- Цыбульников С.И. Патент РФ № 2 125 182 Ветроэнергетическая установка
- Kansas Historical Society “Wind Wagon” Archived from the original on July 6 2017.Retrieved 7July 2017. URL: https://www.kansasmemory.org/item/318948access date 27.06.2022
- Дигай П. Под парусами по рельсам. URL: https://www.yachtrussia.com/articles/2016/10/21/articles_391.htmlaccess date 27.06.2022
- ЧекаревК.В., ЗалихановА.М., СоловьевД.А, ДегтяревК.С. Паруснаяэнергетическаяустановка, преобразующаяэнергиюпотоковдвух сред// Окружающая среда и энерговедение: № 3. 2020. С.39-46.